任务与 TODO
BareAgent 当前有两套名字相近、但职责完全不同的任务机制:
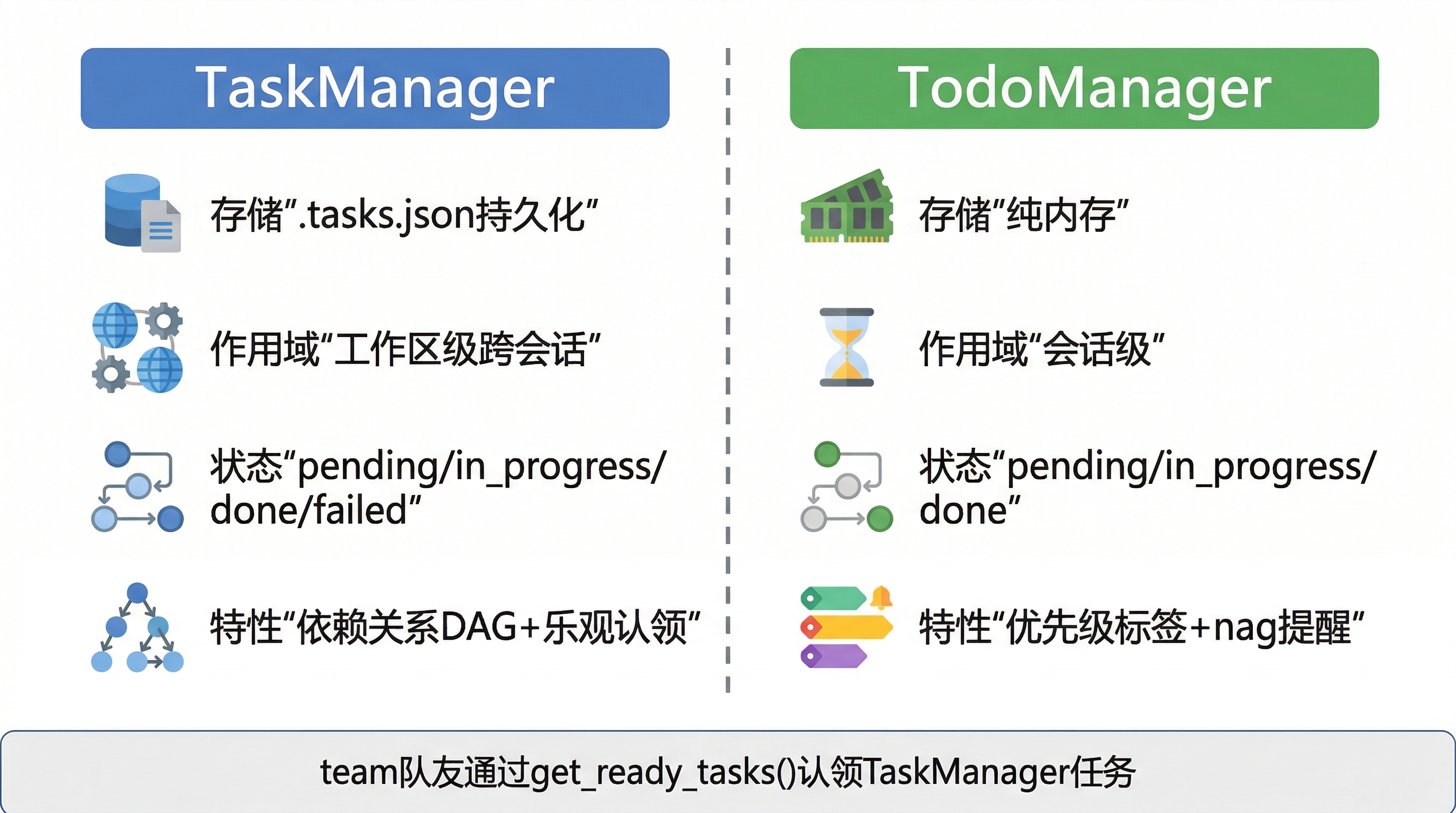
TaskManager:工作区级、持久化、可带依赖关系TodoManager:会话级、纯内存、用于跟踪当前对话中的短期待办
它们都位于 src/planning/,也都向模型暴露了工具,但心智模型不能混在一起。
12.1 TaskManager
TaskManager 实现位于 src/planning/tasks.py。它管理的是一个工作区共享的任务图,而不是某一次对话里的临时清单。
持久化文件
默认任务文件是工作区根目录下的:
.tasks.json文件结构当前非常直接:
{
"tasks": {
"abc12345": {
"id": "abc12345",
"title": "Review module",
"description": "Inspect the updated manager implementation",
"status": "pending",
"depends_on": [],
"created_at": "2026-04-03T00:00:00+00:00",
"updated_at": "2026-04-03T00:00:00+00:00"
}
}
}保存时使用的是 atomic_write_json():
- 先写临时文件
- 再用
os.replace()原子替换
所以它的持久化方式是“整文件原子覆盖”,不是日志追加。
Task 数据类
每个任务由 Task 数据类表示,当前字段如下:
| 字段 | 含义 |
|---|---|
id | 8 位随机字母数字 id |
title | 任务标题,不能为空 |
description | 可选描述 |
status | pending / in_progress / done / failed |
depends_on | 依赖任务 id 列表 |
created_at | UTC ISO 时间戳 |
updated_at | UTC ISO 时间戳 |
当前依赖模型
大纲里可以把这类系统讲成 blocks / blockedBy 图,但当前 BareAgent 的真实实现更简单:
- 只持久化一个
depends_on单向字段 - 不单独维护
blocks - 也不单独维护
blocked_by
因此“谁阻塞了谁”是运行时从 depends_on 关系推导出来的,不是单独存储的冗余字段。
create()
create(title, description="", depends_on=None) 会做以下事情:
- 去掉标题首尾空白
- 拒绝空标题
- 规范化
depends_on - 校验所有依赖任务 id 都存在
- 生成新 id 和 UTC 时间戳
- 先把任务放进内存图
- 校验整个依赖图无环
- 保存到
.tasks.json
这里的 depends_on 规范化有两个细节:
- 空白 id 会报错
- 重复依赖会自动去重
循环依赖检测
TaskManager 每次创建任务和每次加载任务文件时,都会执行 DFS 检查,确保依赖图无环。
如果出现环,例如:
A depends_on B
B depends_on A会直接抛出:
ValueError("Cyclic task dependency detected at: ...")update()
update() 当前支持更新:
statustitle
其中 status 只允许以下四个值:
pendingin_progressdonefailed
如果确实发生了变更,updated_at 会刷新并重新保存任务文件。
expected_status 的乐观认领语义
虽然对外工具 task_update 没有暴露 expected_status,但 TaskManager.update() 本身支持这个参数。它主要给 team 自治 agent 使用,用于“先检查状态,再原子认领任务”。
典型调用是:
task_manager.update(task.id, status="in_progress", expected_status="pending")如果任务在认领前已经被别人改成了别的状态,就会抛 ValueError,从而避免重复认领。
查询接口
当前查询相关方法有三个:
| 方法 | 作用 |
|---|---|
get(task_id) | 读取单个任务 |
list(status=None) | 列出全部或按状态过滤 |
get_ready_tasks() | 找出当前可执行的 pending 任务 |
其中 get_ready_tasks() 的判定条件是:
- 任务当前状态必须是
pending - 且
depends_on中的所有任务都已经是done
这使 TaskManager 可以被长期运行的 teammate 当成一个简单的任务队列使用。
加载失败时的 REPL 行为
主 REPL 启动时会尝试加载工作区的 .tasks.json。如果这个文件损坏或结构非法:
- 会打印错误
- 但不会让整个 REPL 退出
也就是说,任务系统故障不会把整台 agent 直接拖死。
12.2 TodoManager
TodoManager 实现位于 src/planning/todo.py。它处理的是“这次会话里我接下来要做什么”,而不是长期持久化任务。
存储模型
它只有内存态,没有落盘文件。内部结构大致是:
{
"t1": {"task": "...", "status": "pending", "priority": "normal"},
"t2": {"task": "...", "status": "in_progress", "priority": "high"},
}ID 按顺序自增:
t1, t2, t3, ...生命周期
TodoManager 跟随当前 REPL 会话存在。/new 和 /clear 会显式调用:
todo_manager.reset()因此 TODO 会在新会话开始时清空,但不会影响 .tasks.json 中的持久化任务。
支持的状态
TODO 当前只允许三种状态:
pendingin_progressdone
与 TaskManager 相比,它没有 failed 状态,因为它的定位不是做正式任务编排,而是给当前 agent 保持“短期执行清单”。
priority 的真实语义
大纲里很容易把 TODO priority 讲成固定枚举,比如 high / medium / low,但当前实现其实没有做枚举校验。
真实行为是:
- 默认值是
normal - 传入什么字符串就存什么字符串
- 只会做
strip()和空串回退
所以它更接近“标签”,而不是受限的优先级类型系统。
list()
list() 返回的是面向 LLM 的可读文本,而不是 JSON。例如:
TODO items:
- t1 [done] (normal) Create planner
- t2 [pending] (high) Write tests如果当前没有任何 TODO,会返回:
No TODO items.nag reminder
TodoManager.get_nag_reminder() 会汇总所有未完成项,并生成一段提醒文本,例如:
You still have unfinished TODO items. Keep them in sync with your progress.
- t1 [pending] (normal) ...
- t2 [in_progress] (high) ...如果所有 TODO 都已完成,则返回 None。
这不是一个独立后台线程,而是主 REPL 在每次进入 compact_fn 前,主动把这段提醒注入消息历史。
提醒消息的插入位置
主 REPL 会把 nag reminder 包装成:
<nag-reminder>
...
</nag-reminder>的 system 消息,并尽量插在“最近一条真实用户消息之后”。
当前实现特意避免把 nag reminder 插到:
- assistant 的
tool_use - 和紧随其后的
tool_result
之间。这样可以保持工具调用回合结构完整,不打断 assistant -> tool_result 的配对关系。
12.3 对应工具
任务和 TODO 都通过工具暴露给模型,但返回值形态并不完全一致。
task_*
TaskManager 对应 4 个工具:
| 工具 | 作用 | 返回 |
|---|---|---|
task_create | 创建持久化任务 | 单个任务字典 |
task_update | 更新状态和/或标题 | 单个任务字典 |
task_get | 读取单个任务 | 单个任务字典 |
task_list | 列出任务,可按状态过滤 | list[task-dict] |
当前 schema 和 handler 还暴露出几个实际边界:
task_create允许description=""task_create允许depends_on=[]task_update的 schema 里status和title都是可选- 但 handler 实际要求两者至少提供一个,否则报错
todo_*
TodoManager 对应 2 个工具:
| 工具 | 作用 | 返回 |
|---|---|---|
todo_write | 新建或更新 TODO | 状态字符串 |
todo_read | 列出当前 TODO | 文本列表 |
todo_write 通过 action 分流:
action="add"时需要task,可选priorityaction="update"时需要task_id和status
权限侧的细节
这几组工具在权限模型里也有不同待遇:
todo_read/todo_write被视为 safe toolstask_list/task_get也是 safe toolstask_create/task_update在DEFAULT和AUTO下不会额外确认- 但在
PLAN模式下,task_create/task_update仍会被拦截
因此“工具存在”不等于“所有模式下都能执行”。
与 team 系统的衔接
TaskManager 不只给主 agent 用。长期运行的 AutonomousAgent 还会这样使用它:
- 周期性调用
get_ready_tasks() - 用
expected_status="pending"尝试乐观认领 - 执行任务
- 成功则标记
done - 失败则标记
failed
所以任务系统和多智能体系统之间并不是隔离的,而是通过“ready task + 状态流转”自然衔接。
小结
BareAgent 当前的两套待办机制可以这样区分:
TaskManager是工作区级的正式任务图,落盘到.tasks.jsonTodoManager是会话级的临时执行清单,只存在内存里task_*更适合跨回合、跨 agent 的工作编排todo_*更适合让当前 agent 在一次会话里保持节奏和提醒
下一章会介绍另一类“按需加载”的规划层能力:BareAgent 如何扫描 skills/ 目录,并在需要时把某个 SKILL.md 注入到当前上下文中。