多智能体协调
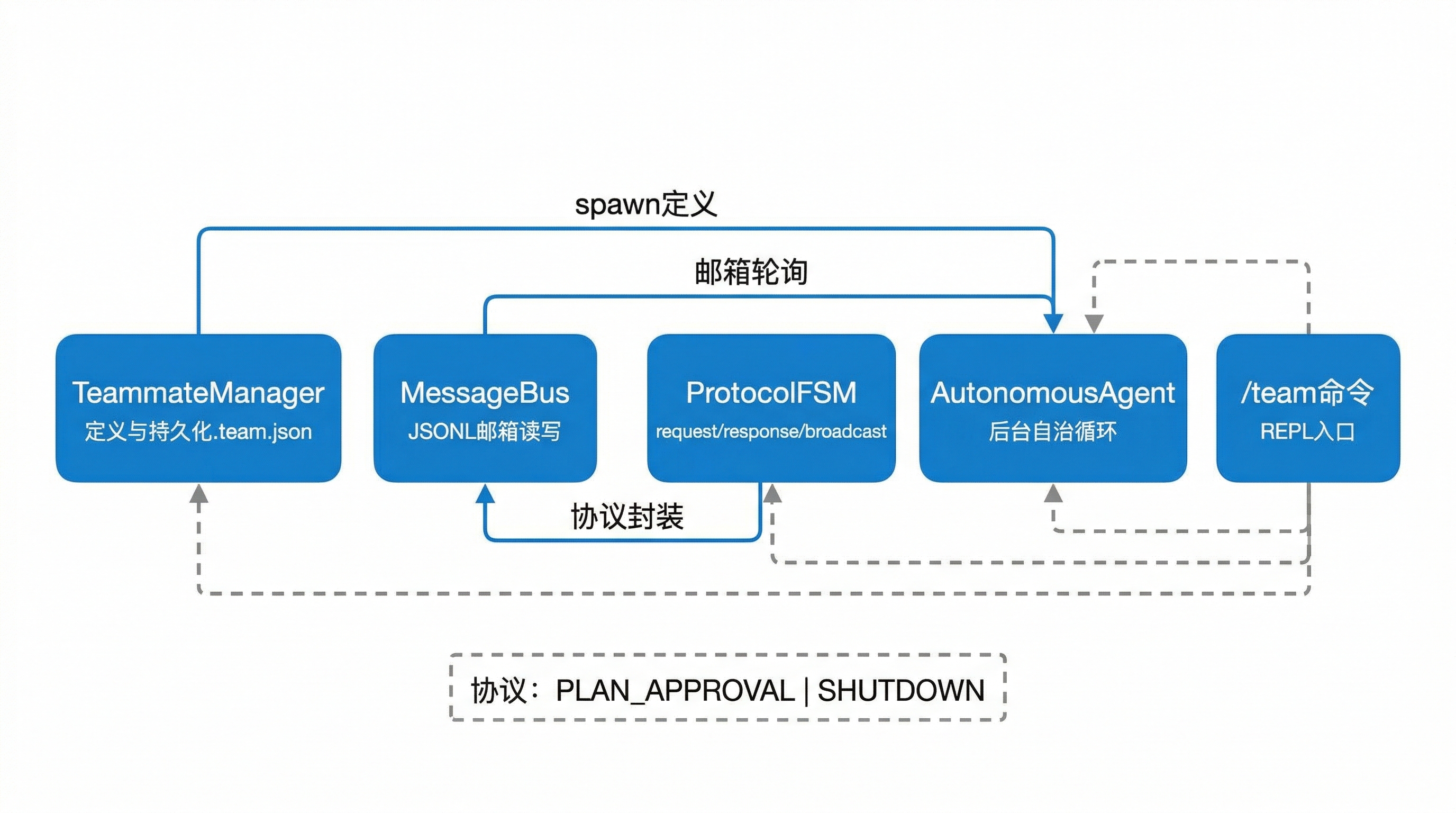
BareAgent 的 team 系统不是一个抽象的“群聊”概念,而是一组可分解的基础组件:
TeammateManager负责持久化队友定义MessageBus负责邮箱式消息传递ProtocolFSM负责请求-响应协议封装AutonomousAgent负责后台自治循环/team命令负责把这些能力暴露给主 REPL
从实现上看,这套系统更接近”基于 JSONL 邮箱的轻量协作框架”,而不是复杂的分布式调度器。
10.1 消息总线
消息总线实现位于 src/team/mailbox.py,核心类型有两个:
MessageMessageBus
Message
每条消息都包含以下字段:
| 字段 | 含义 |
|---|---|
id | 消息 id;为空时发送前自动生成 |
from_agent | 发送方 agent 名 |
to_agent | 接收方 agent 名 |
content | 文本内容 |
msg_type | 消息类型,例如 request、response、broadcast |
timestamp | ISO 8601 时间戳;为空时发送前自动生成 |
in_reply_to | 可选,表示这是对哪条请求的响应 |
邮箱模型
MessageBus 采用“每个 agent 一个 JSONL 文件”的追加式邮箱模型:
.mailbox/
main.jsonl
reviewer.jsonl
tester.jsonl每次 send() 都是在目标 agent 的邮箱文件末尾追加一行 JSON。
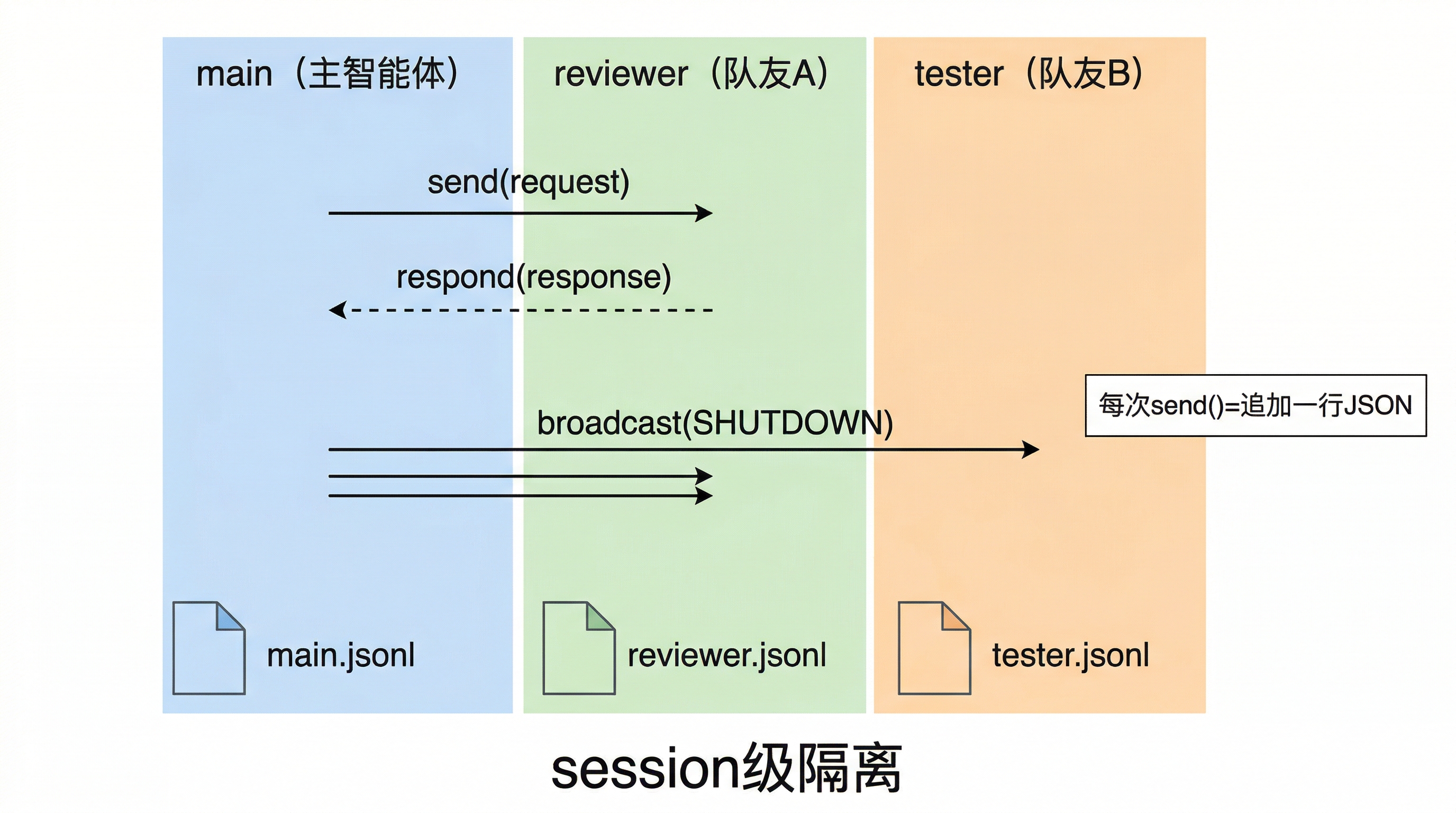
session 级隔离
MessageBus 类本身默认目录是 .mailbox,但主 REPL 不直接使用这个默认值。当前 src/main.py 会为每个 session 单独创建:
.mailbox/<session_id>/因此在完整 BareAgent 运行时,实际邮箱路径更接近:
.mailbox/20260405-120000-abc123/main.jsonl这让不同 REPL 会话之间的队友消息天然隔离。
agent 名约束
agent 名必须匹配:
^[A-Za-z0-9_-]+$也就是说只允许:
- 字母
- 数字
_-
空字符串、空白名或带空格的名称都会被拒绝。
receive(since_id=...) 的语义
receive(agent_name, since_id=...) 返回的是“游标之后”的消息:
- 如果
since_id=None,从头读完整个邮箱 - 如果
since_id存在,则从该消息之后开始返回 - 游标对应的那条消息本身不会重复返回
这是一种“tail after cursor”的读取语义,适合持续轮询。
并发与等待
MessageBus 内部还维护了:
- 每个邮箱文件一把锁,保证追加和读取不会互相踩
- 条件变量和 signal 计数,用于
wait_for_message() - 最近消息的内存索引缓存,用于
find_message()
因此 ProtocolFSM.wait_response() 不需要忙等轮询整个文件,而是可以在短轮询之外等待条件变量唤醒。
10.2 协议状态机
协议层实现位于 src/team/protocols.py。名字叫 ProtocolFSM,但当前实现更准确地说是一个“带协议封装的请求-响应 helper”,而不是复杂的显式状态机。
当前协议枚举
Protocol 枚举目前只定义了两个协议:
| 协议 | 用途 |
|---|---|
PLAN_APPROVAL | 请求对方审阅计划并给出批准/拒绝意见 |
SHUTDOWN | 通知对方停止运行 |
内容编码
协议消息会被编码成 JSON 字符串:
{
"protocol": "plan_approval",
"content": "计划正文"
}decode_protocol_content() 会尝试把普通文本解析回:
(Protocol, body),如果内容是合法协议包(None, 原始文本),如果只是普通消息
request() / respond() / broadcast()
ProtocolFSM 提供三类核心操作:
| 方法 | 作用 |
|---|---|
request(to, protocol, content) | 发送一条 msg_type="request" 的协议消息 |
respond(in_reply_to, content) | 对指定请求生成 msg_type="response" 的回包 |
broadcast(protocol, content) | 向当前邮箱目录中除自己以外的所有 mailbox 广播 |
其中 respond() 的一个细节很重要:它会先查出原始请求消息,再复用原请求里的协议类型。也就是说,如果你响应的是 PLAN_APPROVAL,返回消息仍然会被包装成 PLAN_APPROVAL 协议内容,而不是纯文本。
wait_response()
wait_response(msg_id, timeout=60) 的逻辑是:
- 持续轮询当前 agent 的邮箱
- 只关注
msg_type == "response"的消息 - 只有
in_reply_to == msg_id才算目标响应 - 每轮之间通过
wait_for_message()等待最多 0.5 秒
因此它是“轮询 + 条件变量”的混合实现,而不是单次阻塞式 RPC。
10.3 自治智能体
长期运行的队友由 src/team/autonomous.py 中的 AutonomousAgent 表示。
核心循环
AutonomousAgent.run() 的顺序是:
- 读取自上次游标之后的新邮箱消息
- 如果有消息,优先处理消息
- 如果没有消息且绑定了
TaskManager,再尝试认领 ready task - 如果两边都没有工作,则
sleep(poll_interval)
这意味着“邮箱消息优先于任务队列”。
处理邮箱消息
收到消息后,自治 agent 会按以下规则处理:
- 如果协议是
SHUTDOWN,立即设置_shutdown=True - 否则只有
msg_type == "request"的消息会被当作工作请求 - 处理完后用
ProtocolFSM.respond()给发送方回包
PLAN_APPROVAL 的特殊提示
如果协议是 PLAN_APPROVAL,自治 agent 不会直接把原文转给 LLM,而是会先包一层提示:
请审阅下面的计划,判断是否应批准,并给出简洁理由。也就是说,当前 PLAN_APPROVAL 的“状态机”语义主要体现在 prompt 适配,而不是复杂的审批流控制。
任务认领
如果 agent 绑定了 TaskManager,它会调用 get_ready_tasks() 获取可执行任务,再通过:
task_manager.update(task.id, status="in_progress", expected_status="pending")进行乐观认领。
如果认领成功:
- 调用
_run_prompt()执行任务 - 成功则把任务更新为
done - 失败则标记为
failed
启动时忽略旧 shutdown
构造 AutonomousAgent 时,会把 _last_seen_id 初始化为当前邮箱里的最新消息 id。这样一来,启动前遗留在邮箱里的旧 SHUTDOWN 广播不会被重新消费,从而避免 agent 一启动就立刻停掉。
10.4 TeammateManager
TeammateManager 位于 src/team/manager.py,负责 teammate 定义的持久化,而不是消息通信本身。
持久化文件
主 REPL 默认把队友定义存放在工作区根目录:
.team.json这个文件是跨 session 共享的;和 session 级邮箱目录不同,它不会因为 /new 而切换。
Teammate
每个 teammate 定义包含:
| 字段 | 含义 |
|---|---|
name | 队友名称 |
role | 简短角色描述 |
system_prompt | 启动该队友时使用的系统提示 |
provider_config | 可选 provider 覆盖配置 |
一个简化后的 .team.json 结构示例如下:
{
"teammates": {
"code-reviewer": {
"name": "code-reviewer",
"role": "Review code for bugs and regressions",
"system_prompt": "You are a code reviewer.",
"provider_config": {
"model": "gpt-4.1"
}
}
}
}spawn() 的职责边界
TeammateManager.spawn(name, provider_factory) 只负责:
- 读取并快照化队友定义
- 用
provider_factory构造独立 provider - 返回一个
AgentInstance
它不会自己启动线程,也不会自己加入消息总线。真正把队友跑起来,是主 REPL 在 _make_team_handlers() 里完成的。
10.5 /team 命令
对用户可见的入口是 REPL 命令:
/team list
/team spawn <name>
/team send <name> <message>/team list
/team list 会列出当前 .team.json 中所有已注册 teammate,并附带一个 running 状态。
需要注意,这个 running 状态来自当前进程内的 spawned_agents 字典,而不是去扫描外部邮箱或后台线程。因此它表示的是:
- “这个 REPL 进程是否已经启动过该 teammate”
而不是:
- “系统里是否存在任何同名 agent 活动”
/team spawn <name>
当前实现的启动流程是:
- 通过
TeammateManager.spawn()构造AgentInstance - 为该 teammate 准备邮箱
- 克隆一份
permission,并强制fail_closed=True - 构造一套该 teammate 专用的 handlers
- 创建
AutonomousAgent - 通过
BackgroundManager.submit()以后台线程方式运行其run()循环
如果同名后台任务已在运行,会返回:
Teammate <name> is already running./team send <name> <message>
team_send 会向目标 agent 的邮箱写入一条 msg_type="request" 消息,并返回消息 id。
实现上的两个细节是:
- 发送到
main时不会要求目标先注册 - 发送到其他名字时,会先通过
TeammateManager.get()校验该队友已注册
返回文本类似:
Sent message <message_id> to code-reviewer主 REPL 如何接收队友响应
主循环每轮会调用 _drain_team_mailbox() 读取 main 邮箱中的新消息,并把它们打印成状态行,例如:
Team response from code-reviewer: ...
Team request from planner [plan_approval]: ...因此主 agent 和 teammate 之间的通信并不是通过特殊内部 API 完成的,而是同样经过邮箱文件。
10.6 当前边界与定位
BareAgent 当前的多智能体系统已经足够支持:
- 启动长期运行的队友
- 通过邮箱发起请求和接收响应
- 广播关闭
- 让队友顺手认领
TaskManager中的 ready task
但它还不是一个复杂的编排平台。当前没有:
- 更细粒度的资源调度
- 跨进程运行状态发现
- 持久化的复杂协议状态机
- 自动的多阶段审批流
所以在阅读或扩展这部分代码时,最稳妥的心智模型仍然是:
- “邮箱 + 后台线程 + 轻量协议 + 可选任务认领”
与任务系统的结合见 任务与 TODO,与后台线程执行模型的细节见 后台执行。
小结
BareAgent 的 team 系统由四层组件拼起来:
TeammateManager负责定义谁是队友MessageBus负责把消息写进谁的邮箱ProtocolFSM负责把普通消息包装成 request / response / broadcast 协议AutonomousAgent负责让某个队友持续运行并处理消息或任务
下一章会回到单智能体也会受益的一项基础能力:当消息越来越长时,BareAgent 如何对上下文做微压缩和完整压缩,以避免 token 持续膨胀。